
Alte ruote resistenti del robot della ruota motrice del motore a corrente alternata della trazione del carico di gomma del passo 2T 15km/H
-
Evidenziare
ruota motrice del motore a corrente alternata 2T
,ruota motrice del motore a corrente alternata 15km/h
,ruote resistenti del robot 15km/h
-
Passo della ruotaSoild di gomma
-
Diametro di ruota400mm
-
Carico2t
-
velocità15km/h
-
Potere della trazione2000W
-
Potere di guida750W
-
Coppia di torsione della potenza nominale143Nm
-
Scena di usoAll'aperto
-
Luogo di origineCanton, Cina
-
MarcaZHLUN
-
Numero di modelloZL-490
-
Quantità di ordine minimoNegoziabile
-
PrezzoNegotiable
-
Imballaggi particolariImballaggio: Scatola di legno
-
Tempi di consegna25 giorni
-
Termini di pagamentoL/C, T/T
-
Capacità di alimentazione1000 pezzi al mese
Alte ruote resistenti del robot della ruota motrice del motore a corrente alternata della trazione del carico di gomma del passo 2T 15km/H

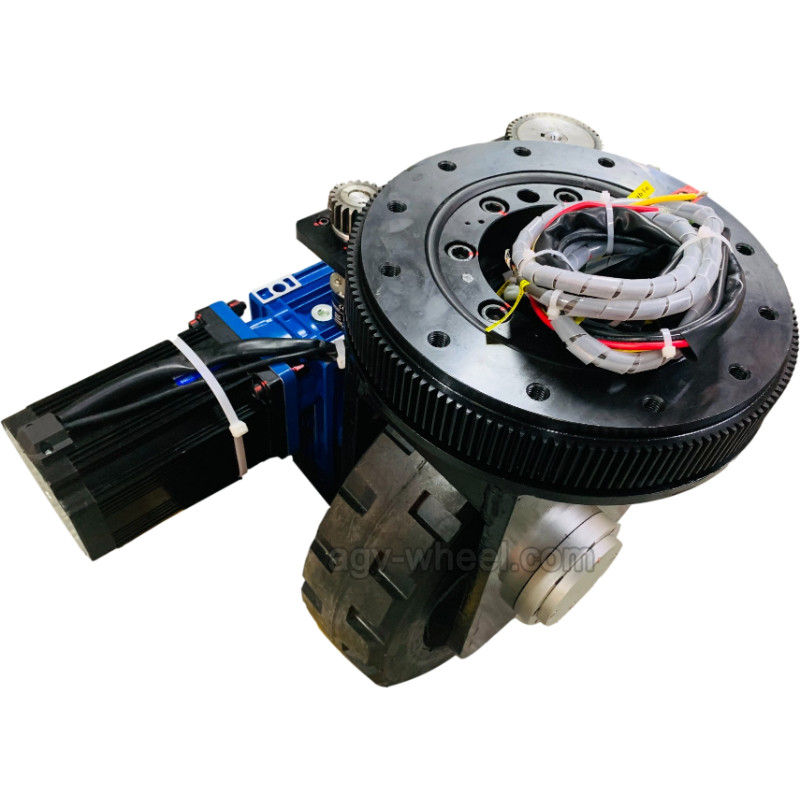
Il robot resistente del passo di gomma spinge l'alto potere della trazione del carico 2T
Specificazione
|
Nessun
|
Oggetto
|
Unità
|
Dati
|
|
1
|
Altezza dell'installazione
|
millimetro
|
490
|
|
2
|
Carico
|
Chilogrammo
|
2000
|
|
3
|
Tipo del motore
|
/
|
BLDC/Servo
|
|
4
|
Motore della trazione
|
Chilowatt
|
2
|
|
5
|
Rapporto di velocità
|
/
|
1:15
|
|
6
|
Motore di guida
|
Chilowatt
|
0,75
|
|
7
|
Velocità
|
km/ora
|
15
|
|
8
|
Diametro di ruota
|
millimetro
|
400
|
|
9
|
Larghezza della ruota
|
millimetro
|
100
|
|
10
|
Sensore
|
/
|
Facoltativo
|
|
11
|
Max.Torque
|
Nanometro
|
143
|
|
Alcuni parametri possono essere regolato
|
|||
Caratteristiche
La struttura antivibrazione delle ruote ed il dispositivo di sterzo di alto-coppia di torsione delle ruote con i cuscinetti di rotolamento affusolati rigorosamente sono destinati per soddisfare le richieste funzionali.
Sulla base della dinamica specifica della disposizione e di veicolo della ruota, il modello cinematico rotazionale come pure i modelli dinamici diritti e rotazionali del AGV sono stabiliti.
Per verificare bene le caratteristiche di moto delle ruote nell'ambito dell'onere gravoso in tre stati di moto compreso moto diritto, la auto-rotazione e la rotazione intorno a certo punto, le simulazioni in ADAMS e gli esperimenti della fabbrica tutti sono stati condotti.
I risultati di simulazione indicano che il normale e le forze di attrito delle ruote sono molto stabili eccezione fatta per alcune piccole oscillazioni, che sono causate tramite distribuzione di carico del non centro sul AGV.
I risultati sperimentali sul determinare la velocità del AGV direttamente hanno dimostrato che la sua precisione di posizionamento è abbastanza per uso nelle catene di montaggio reali degli aerei.
Un nuovo piano all'aperto della disposizione delle ruote per un AGV resistente omnidirezionale è proposto, che migliora il funzionamento e la capacità commovente del AGV. Una funzione di collaborazione uomo/macchina inoltre è offerta dal AGV per il trasporto dei pezzi in lavorazione grandi intelligentemente ed economicamente nello spazio aereo ed in altre industrie pesanti.
![]()
![]()
![]()
I nostri prodotti sono venduti in tutto il mondo. Puoi stare certo dell'intero processo dei nostri prodotti.