L'auto guida autonomo bidirezionale dei veicoli del AGV 600kg ha guidato i veicoli
-
Evidenziare
veicoli guida autonomi del AGV 600kg
,Veicoli guida autonomi del AGV
,l'auto 600kg ha guidato i veicoli
-
Componenti del centroSpA, motore
-
ApplicazioneManeggio del materiale
-
dimensioneL1875*W580*H350
-
Carico utile600kg
-
MovimentoBidirezionale
-
MaterialeAcciaio inossidabile
-
Peso (chilogrammi)250
-
CertificatiCE
-
Luogo di origineCanton, Cina
-
MarcaZHLUN
-
CertificazioneISO9001
-
Numero di modelloZL-TR-K1
-
Quantità di ordine minimoNegoziabile
-
PrezzoNegotiable
-
Imballaggi particolariImballaggio: Scatola di legno
-
Tempi di consegna25 giorni
-
Termini di pagamentoL/C, T/T, Western Union
-
Capacità di alimentazione1000 pezzi al mese
L'auto guida autonomo bidirezionale dei veicoli del AGV 600kg ha guidato i veicoli
Agv automatico del magazzino del veicolo della guida della ruota motrice del AGV Logitech per industria
Il AGV è uno scartamento normale, treno multiplo ad alta velocità e elettrico progettato e costruito dall'Alstom. L'Alstom offre il AGV nelle configurazioni da sette a quattordici carrelli, di sedili 245 - 446 persone a sedere. I treni sono costruiti dalle unità che comprendono tre automobili e driver-rimorchi dell'unico automobile. La velocità commerciale massima è 360 km/ora.
![]()
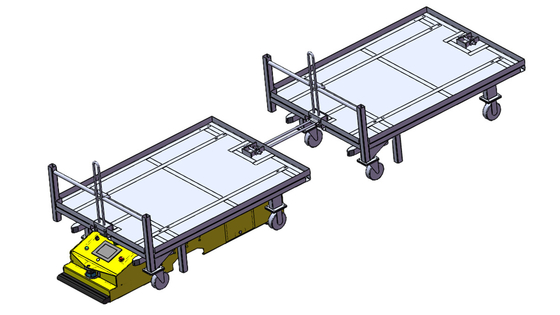
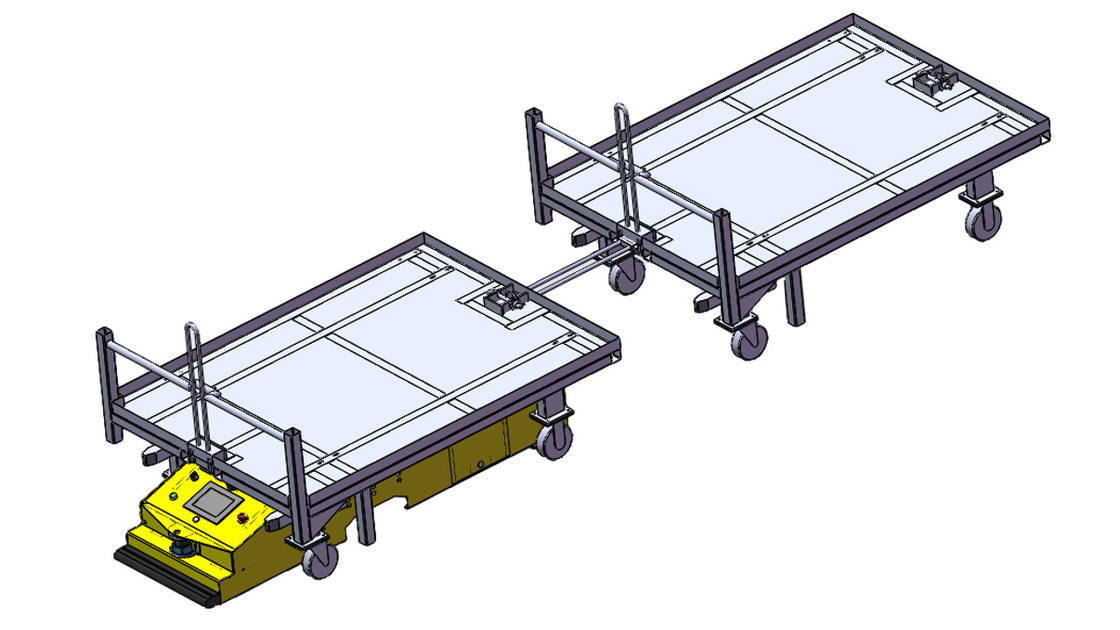
L'utilizzazione dei carrelli del AGV in fabbriche fabbricanti sta diventando sempre più comune. Può realizzare il trattamento senza equipaggio e realizza l'automazione del trasferimento offline e ed intermedio online e automatico automatico dai prodotti nei materiali, che è una buona soluzione per migliorare l'efficienza della logistica di produzione. Nel processo di fabbricazione di fabbricazione, il trasporto del inter-pavimento è effettuato spesso, che è inoltre realizzabile per il AGV. Attualmente, i produttori più potenti del AGV possono raggiungere il trasporto automatico attraverso i pavimenti. La difficoltà del trasporto del inter-pavimento del AGV è di risolvere la tecnologia del AGV che i carrelli guidano automaticamente gli elevatori.
Come l'automobile del AGV prende automaticamente l'elevatore?
Il processo dell'automobile del AGV che prende l'elevatore è diviso automaticamente nei seguenti punti:
![]()
1. L'automobile del AGV arriva alla porta ed alle fermate dell'elevatore ed il sistema di controllo del AGV invia un'istruzione di richiesta dell'entrata dell'elevatore all'elevatore attraverso la rete.
2. Dopo che l'elevatore riceve il segnale dal sistema di controllo del AGV, apre la porta e mantiene lo stato normalmente aperto. E risposte il segnale che l'elevatore è stato aperto al sistema di controllo del AGV.
3. Dopo la ricezione del segnale che l'elevatore è stato aperto, le edizioni del sistema di controllo del AGV un insegnamento della guida al carrello del AGV ed al carrello del AGV entra nell'elevatore.
4. Dopo che l'automobile del AGV entra nell'elevatore, invia un'istruzione del pavimento all'elevatore. L'elevatore riceve l'istruzione, chiude l'elevatore ed arriva al pavimento designato.
5. Dopo che l'elevatore raggiunge il pavimento designato, la porta dell'elevatore apre e tiene lo stato normalmente aperto. Ed invii alla porta dell'elevatore il segnale normalmente aperto al sistema di controllo del AGV.
6. Dopo che il sistema di controllo del AGV riceve l'arrivo al pavimento designato, invia un insegnamento della guida al carrello del AGV ed il carrello del AGV utilizza l'elevatore.
7. Dopo che il carrello del AGV esce l'elevatore, il sistema di controllo del AGV retroagisce un segnale all'elevatore, la porta dell'elevatore è chiusa ed il ciclo seguente è inserito.
Nell'intero processo, possiamo capirlo come l'interazione fra l'automobile del AGV, il AGV che spediscono il sistema di gestione e l'elevatore intelligente. Comprende l'interazione fra l'automobile del AGV ed il AGV che spediscono il sistema di gestione attraverso la rete wireless ed il AGV che spedisce lo scambio di informazioni e di sistema di gestione fra gli elevatori.
![]()
Qui è pricipalmente dividere con voi il processo di interazione del sistema e dell'elevatore del AGV: Il AGV fa domanda per la registrazione di risposte dell'elevatore del → di registrazione dell'elevatore è riuscite richieste del AGV del → del pavimento di risposte dell'elevatore del → del pavimento dell'elevatore di domande del AGV del → il AGV del → che della tenuta della porta dell'elevatore del → della porta dell'elevatore fornisce/che fermata del AGV del → elevatore delle uscite che invia con successo il rilascio di chiusura d'apertura dell'elevatore del → della porta dell'elevatore del → di richiesta della porta.
Con il miglioramento della tecnologia del AGV, gli scenari dell'applicazione del AGV più ulteriormente saranno ampliati. In futuro, i carrelli del AGV potranno più adattarsi agli scenari complessi del lavoro quali gli ostacoli multipli, i pavimenti trasversali ed i magazzini stipati di e possono di più assicurare la sicurezza, la stabilità, l'affidabilità e l'ordine della logistica che tratta il processo.
|
Oggetto
|
Specifiche
|
|
Modello
|
ZL-TR-K1 |
|
Dimensioni
|
L1875*W580*H350
|
|
Metodo della guida
|
Navigazione magnetica
|
|
Direzione di camminata
|
In avanti, manzo, parte posteriore
|
|
Velocità di andata
|
90m/min
|
|
Capacità di carico
|
600Kg
|
|
Batteria
|
Batteria al litio
|
|
Metodo di carico
|
Tassa senza fili
|
|
Il modo di esposizione elettrica
|
Visualizzazione elettronica
|
|
Sicurezza che percepisce distanza
|
3m
|
|
Forma dell'allarme
|
Allarme di musica ed allarme leggero
|
|
Centrale elettrica
|
Motore di BLDC
|
|
Sistema di sicurezza
|
Superamento degli ostacoli infrarosso, progettazione antiurto meccanica, bottone dell'arresto di emergenza
|
Immagine della fabbrica
![]()
![]()
![]()
I nostri prodotti sono venduti in tutto il mondo. Puoi stare certo dell'intero processo dei nostri prodotti.